Shopinyon
Yahboom ROSMASTER X3 ROS2 Robot Smart Car No Motherboard with Mecanum Wheel Electronic Learning Kit for Jetson NANO
Yahboom ROSMASTER X3 ROS2 Robot Smart Car No Motherboard with Mecanum Wheel Electronic Learning Kit for Jetson NANO
In stock
Couldn't load pickup availability
Description:
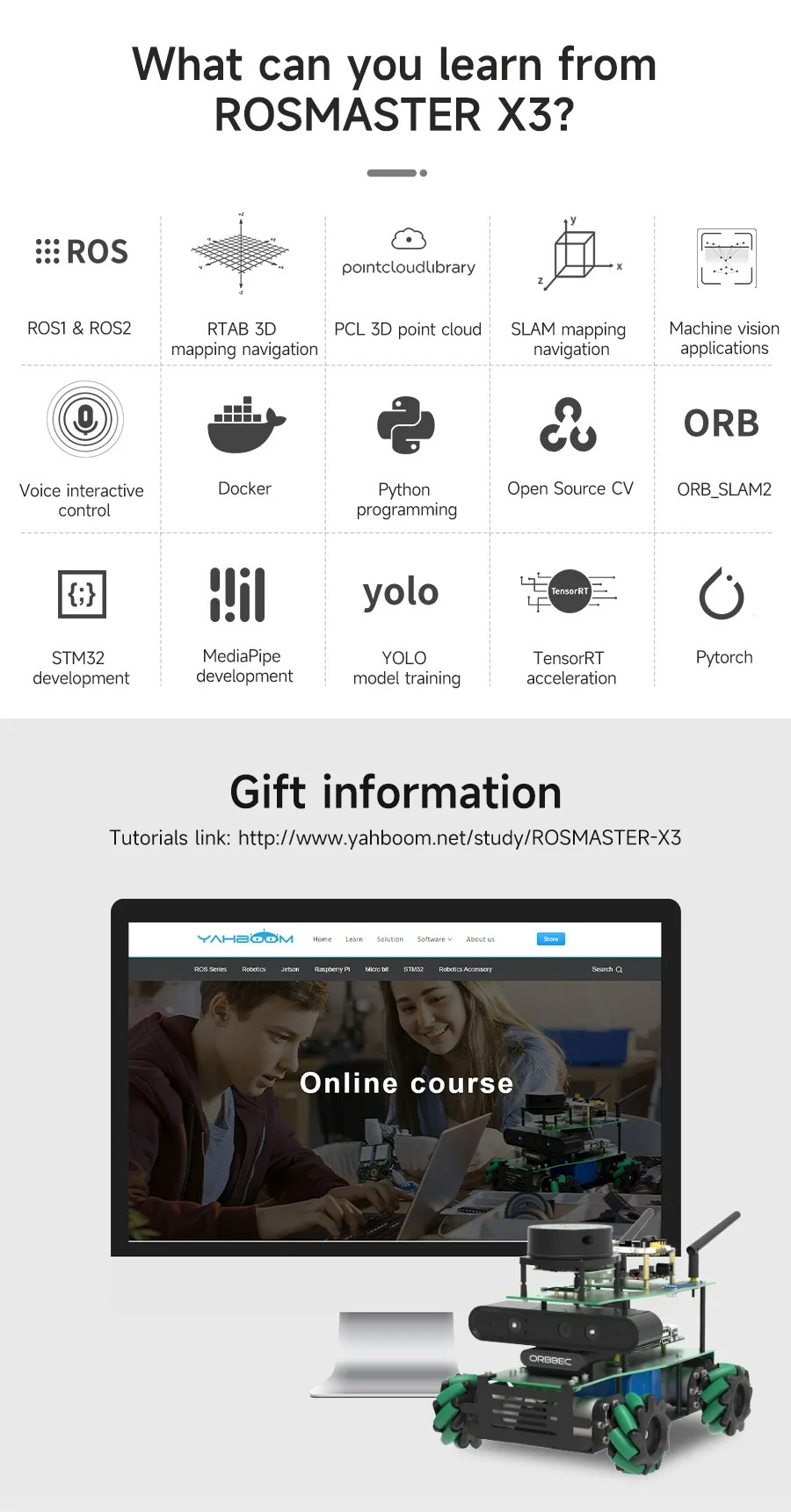
ROSMASTER X3 is an educational robot based on the robot operating system with Mecanum Wheel, compatible with Jetson NANO/Orin NX/Orin NANO and Raspberry Pi 5. It is equipped with lidar, depth camera, voice interaction module and other high-performance hardware modules. Using Python programming, ROSMASTER X3 can realize mapping and navigation, following or avoiding, Autopilot and human body posture detect. It support APP remote control, APP mapping navigation, handle remote control, ROSsystem PC control and other cross-platform remote control methods. We provide 103 video courses and a large number of codes, which can allow users to learn artificial intelligence programming and ROSsystems.
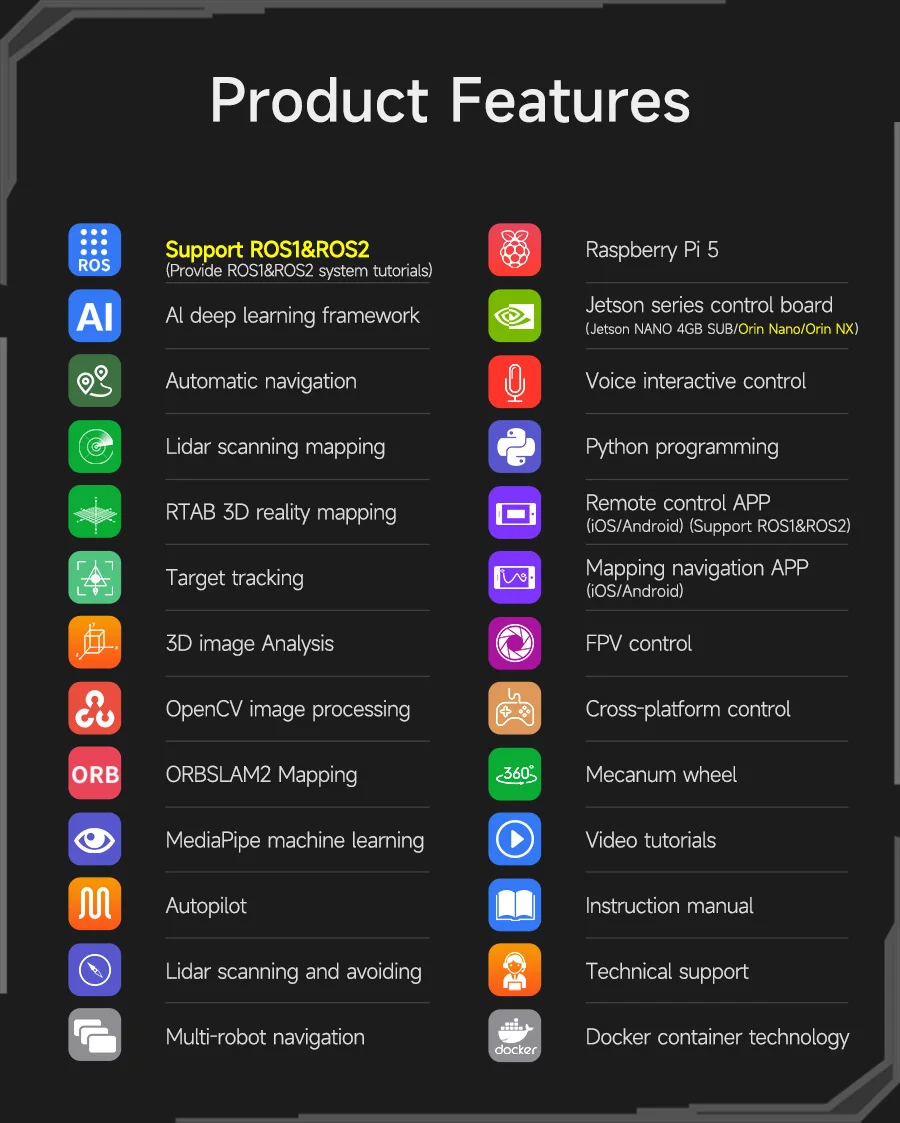
Features:
1. Aluminum alloy material, Mecanum wheels 360°omnidirectional movement.
2. Professional hardware configuration, lidar, depth camera, voice interaction module, etc.
3. Using ORBSLAM2+Octomap, RRT algorithms to achieve 3D mapping navigation and autonomous positioning.
4. Combined with the voice interaction module, user can control the motion state of the robot or complete some functions through voice commands.
5. Various remote control methods such as mobile phone APP, handle, ROSsystem and computer keyboard.
6. 103 detailed video tutorials and ROS2 open source codes, as well as professional technical support will be provided for free.
Package Include:
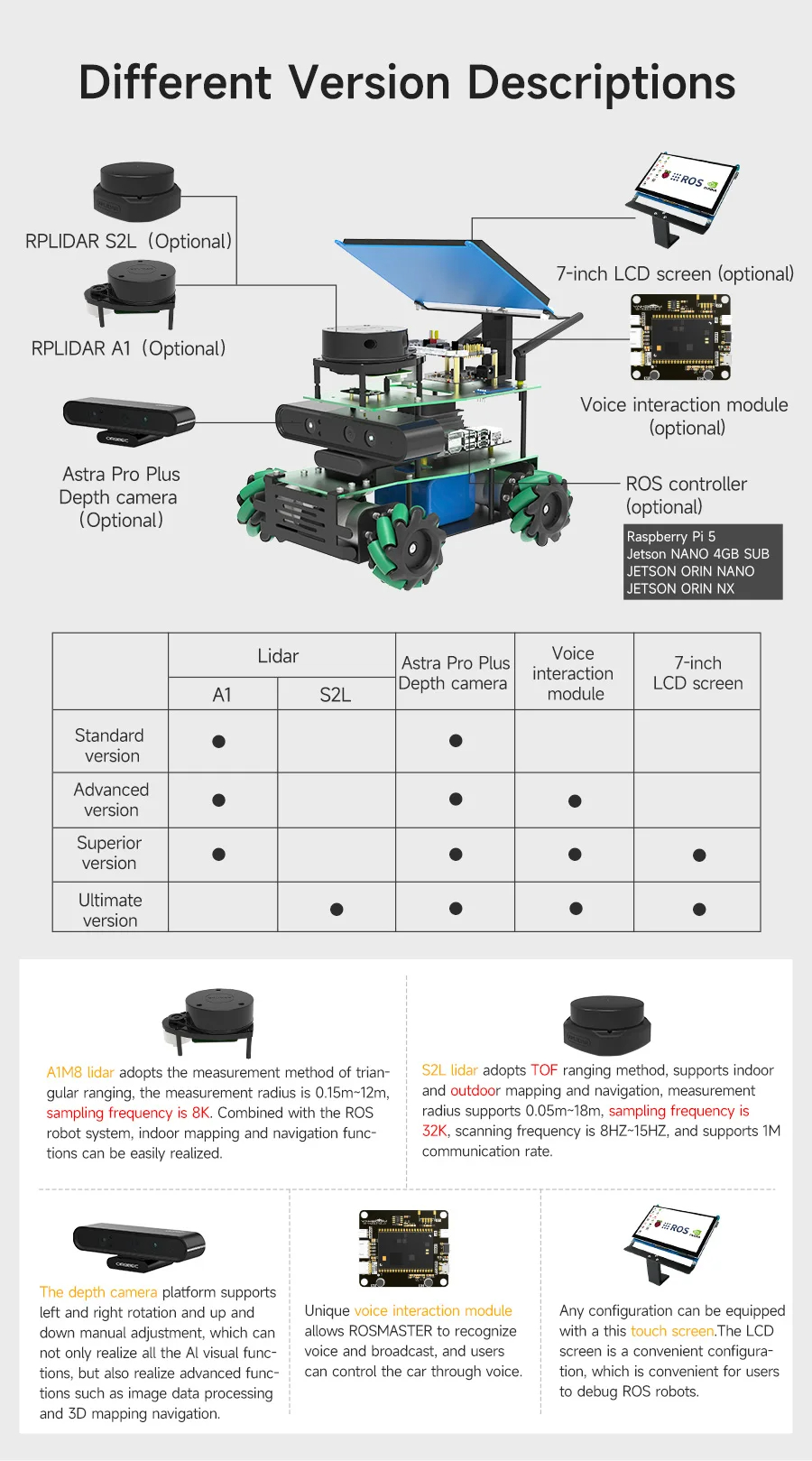
【Standard Version-NO JETSON】:
1x Car Body
1x RPLIDAR A1
1x ROS Robot Expansion Board
1x USB Wireless Handle
1x Depth Camera
【Advanced Version-NO JETSON】:
1x Car Body
1x RPLIDAR A1
1x ROS Robot Expansion Board
1x USB Wireless Handle
1x Depth Camera
1x Voice Interaction Module
【Superior Version-NO JETSON】:
1x Car Body
1x RPLIDAR A1
1x ROS Robot Expansion Board
1x USB Wireless Handle
1x Depth Camera
1x Voice Interaction Module
1x 7-inch LCD Screen
【Ultimate Version-NO JETSON】:
1x Car Body
1x RPLIDAR S2L
1x ROS Robot Expansion Board
1x USB Wireless Handle
1x Depth Camera
1x Voice Interaction Module
1x 7-inch LCD Screen
| Main control board Compared (Use your own motherboard) | Raspberry Pi 5 8GB | Jetson NANO 4GB SUB | Jetson Orin Nano 4GB | Jetson Orin NX 8GB |
| Microprocessor | Broadcom BCM2712 64-bit 2.4 GHz 4 core CortexA76+VideoCoreVll @800 MHz |
64-bit quad-core ARM A57 @1.43GHz+128 core NVIDIA Maxwell @921MHz GPU | 6-cores Arm® Cortex®-A78AE v8.2 64-bit CPU 1.5MB L2 + 4MB L3 | 6-cores NVIDIA Arm® Cortex A78AE v8.2 64-bit CPU1.5MBL2+4MB L3 |
| AI computing power | 2 times that of Raspberry Pi 4B | 0.5 TFLOPS (FP16) | 20 TOPS (INT8) | 70 TOPS (INT8) |
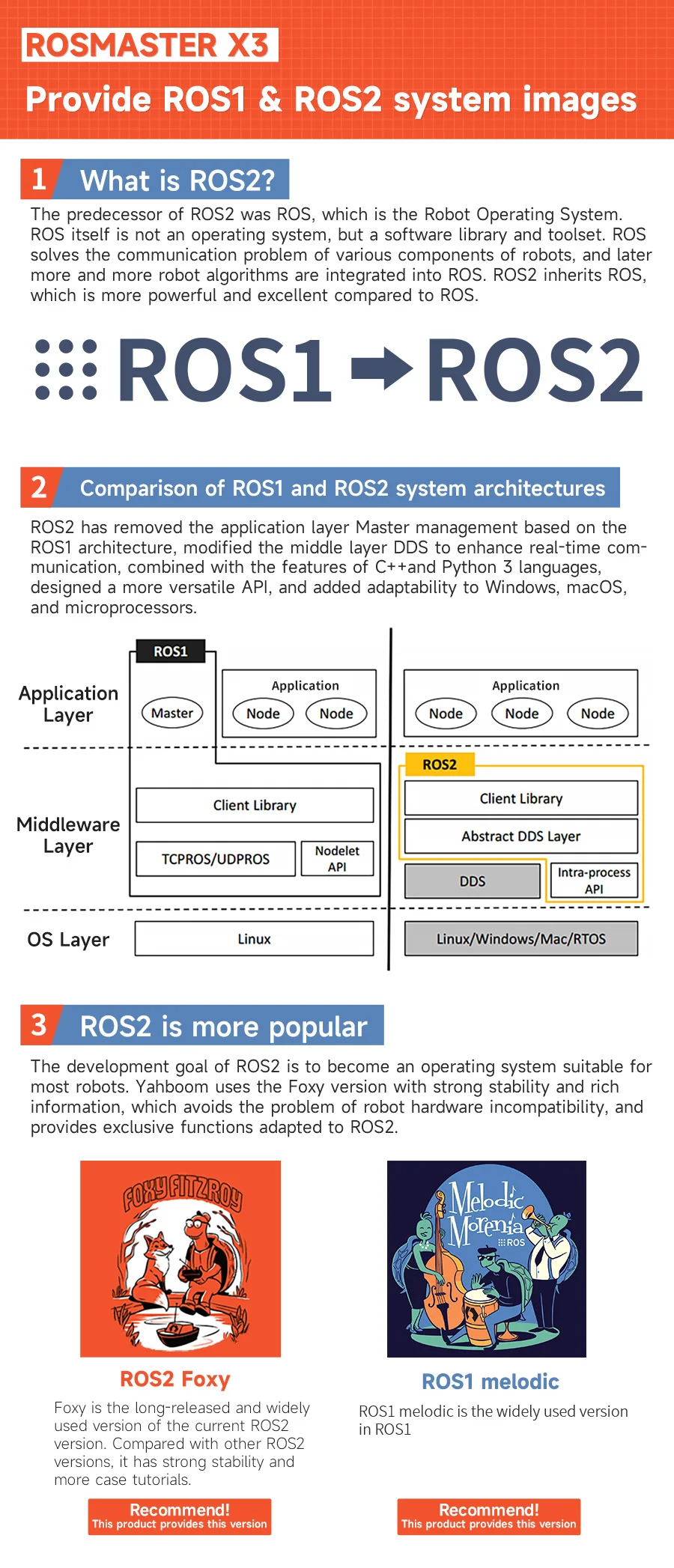
| Operating system | raspios-bookworm-arm64 + Docker+ROS1 Melodic raspios-bookworm-arm64 + Docker+ROS2-Foxy | Ubuntu18.04 LTS+ROS1-Melodic Ubuntu 20.04 LTS+Docker+ROS3-Foxy | Ubuntu 20.04 LTS+Docker+ROS2-Foxy | |
| Programming language | Python | |||
| Input | AstraPro Plus depth camera, SLAM lidar, PS2 wireless handle, 9-axis attitude sensor, motor with encoder | |||
| Output | RGB colorful taillight, buzzer, 520 motor interface*4 Bus servo interface, PWM servo interface*4, OLED display screen | |||
| Motor scheme | 520 metal motor with encoder*4 | |||
| Power scheme | 12.6V 6000mah 2C lithium battery pack | |||
| Working time | 1.5 hours | 1.5 hours | 1 hours | 1 hours |
| Power interface | T-type power supply interface, DC4.0*1.7 charging interface | |||
| Remote control method | Mobile APP, PC computer, PS2 wireless handle | |||
| Communication method | WiFi network (LAN/AP) | |||
| Safety protection | Short circuit protection, over-current protection | |||
| Material | Anodized aluminum alloy | |||
| Weight(assembled) | 3200g-4600g (Different configuration, the weight will different) | |||
| AstraPro Plus depth camera product parameters | |||
| 3D technology | ORBBECR monocular structured light | Range | 0.6-8m |
| Precision | 1m: ±3mm | Field of View (FOV) | H 58.4°x V45.8° |
| Resolution® Frame rate (depth) | 640x480@30fps 320x240@30fps 160x120@30fps | Resolution® Frame rate (RGB) | 1980*720@7fps 1280x720@7fps 640x480@30fps |
| Advanced processing chip | MX600 | Close protection | Support |
| RGB Field of View | H66.73° V40.19°@1920*800 H66.99° V40.37°@1280*720 H66.60° V40.81°@640*480 | UVC(RGB) | Support |
| Support operating system | Android / Linux/ | Data transmission | USB2.0 |
| Size (mm) | 164.85*48.25*40 | Microphone | Two-channel stereo |
| Power consumption | <2.5W | Safety | Class1 laser |
| Operating temperature | 10℃-40℃ | ||
| SALM A1 Lidar | |||
| Model | A1M8 | Angular resolution | ≤1° |
| Recommended scene | Indoor scanning and positioning | Supply current | 100mA |
| Supply voltage | 5V | Power consumption | 0.5w |
| Scanning range | 360° | Output Interface | UART serial port |
| Measuringradius | 0.15m-12m | Operating temperature | 0℃~40℃ |
| Communication rate | 115200bps | Ranging accuracy | ±1% (≤3m) ±2% (3m-5m) ±2.5% (≥5m) |
| Sampling frequency | 8k | ||
| Scanning frequency | 5.5Hz-10Hz | ||
| Size | 96.8mm*70.3mm*55mm | ||
| SALM S2L Lidar | |||
| Model | RPLIDAR S2L | Angular resolution | 0.12° |
| Supply voltage | 5V | Supply current | 400mA |
| Recommended scene | Suitable for indoor and outdoor environments, reliable resistance to sunlight | Communication interface | TTL UART serial port |
| Scanning range | 360° | Operating temperature | -10~50 |
| Measuring method | TOF ranging | Measurement accuracy | ±3cm |
| Measuringradius | 0.05m~18m | Laser safety level | IEC-60825 Class 1 |
| Communication rate | 1M | Scanning frequency | 10Hz |
| Sampling frequency | 32kHz | Size | 77mm*77mm*38.85mm |
| Voice interaction module | |||
| Module type | YB-4001 | MIC type | Electret microphone |
| MIC number | 2 | Sensitivity | -38dBV/Pa |
| Communication method | USB communication + serial communication | Signal to noise ratio | 65dB |
| External interface | 1.Type-c interface for USB communication 2.XH2.54 interface for serial communication 3.Micro USB interface for firmware upgrade 4.The reference signal interface is used for external voice signal input and used for echo cancellation. | On board functions | Speech recognition, voice announcement, echo cancellation |
| Pickup spacing | 6 meters | Operating voltage | 5V |
| Working current | 300mA | Size | 65mm*56mm*1.6mm |
| 520 motor with encoder | |||
| Rated voltage | 12V | Rated power | ≤4W |
| Motor type | Permanent magnet brush | Stall current | 3A |
| Stall torque | 3.1 kgf.cm | Rated current | 0.3A |
| Rated torque | 2.2kgf.cm | Reduction ratio | 1:19 |
| Speed before deceleration | 11000rpm | Speed after deceleration | About 550±10rpm |
| Output shaft | Diameter 6mm, D-type eccentric shaft | Encoder type | Hall encoder |
| Line count | 11 lines | Supply voltage | 3.3-5V |
| Interface Type | PH2.0 | ||
| Power battery pack | |||
| Capacity | 6000mAh | Rated discharge current | 8.8A (2C) |
| Size | 68*55*37mm | Maximum discharge current | 10A |
| Weight | 300g | Plug | T-plug discharge +4017 female |
| Charger | 12.6V 800mA | Portect | Over-current, over-charge, over-discharge, short circuit protection |